728x90
6. The Frequency Response Design Method
1. Frequency Response
- 주파수 응답 : 선형시스템에 sinusoidal 입력이 들어갔을 때의 응답
- 입력
- 초기값 0일 때 출력
- G(s)가 n개의 pole을 갖는다고 할 때,
- 주파수 응답
- 안정적인 시스템 응답이 steady state가 되는 경우, pole 항은 모두 소거 :
- 주파수 응답 특성(Frequency Response Characteristics) : 시스템의 sinusoidal 입력에 따른 고유한 Magnitude, Phase의 주파수 응답 특성
-
Bode Plot : 사인파 입력의 주파수가 변화함에 따라 응답의 Magnitude, Phase 변화를 각각 나타내는 그래프
- x축(주파수) : log scale
- y축(Magnitude) : log scale
- y축(phase) : linear scale
- Compensator 설계에 활용 가능
- 각 시스템의 bode plot은 더해질 수 있다.
- log scale이므로 광범위한 응답특성 표현 가능
-
System 일 때
-
Bode Form : 시스템 인수의 상수값이 1
- 전달함수 형태
-
ex. Class-1 :
- (dB)
- Magnitude : 이라고 하면, 20dB/decade의 기울기를 갖는 직선 그래프 생성

- Phase : 의 x축과 평행한 직선 그래프
-
ex. Class-2, 1st-order :
- Magnitude

- : Break Point
- 좌표를 기준으로 0dB/dec, 20dB/dec 기울기의 점근선 형성
- 의 경우 -3dB 점을 기준으로 -20dB/dec 기울기로 감소하는 그래프 형성
- Phase
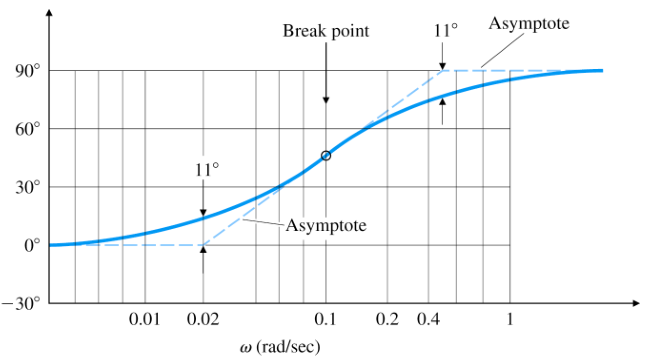
- Break Point :
- 점근선의 기울기, 의 점근선을 기준으로 하는 곡선 그래프 형성
- Magnitude
-
ex. Class-3, 2nd-order term :
- Magnitude

- breakpoint에서 지점을 통과
- Phase

- 차단주파수 전후로 0, 180도의 위상, breakpoint에서
- 가 1에 가까울 수록 완만하게, 0에 가까울수록 급격하게 그래프 변화
- Magnitude
- Bandwidth : Closed-Loop Transfer function
- Amplitude가 1 > 0.707로 감소할 때의 주파수
- 이 때 Magnitude는 약 -3dB
- 전력이 50% 이하로 감소
- Bode Plot 작성
- Magnitude : 전달함수를 Bode Form으로 조절 :
- 주파수를 0으로 근사시켜 기울기 확인 후, 주파수 w=1일 때 점근선 작성
- 각 breakpoint에서의 점근선 작성 : 먼저 작성한 점근선 그래프에 breakpoint 주파수를 대입하여 그 지점을 지나는 점근선으로 작성
- 기울기가 감소, 혹은 증가할 때 Bode Plot 곡선은 교차점에서 차이나는 지점을 지나게 된다.
- Phase : 주파수를 0으로 근사시켜 출발점 위상 확인
- zero를 지나면 +90, pole을 지나면 -90도씩 변화하는 점근선 작성
- Phase Bode Plot 작성 : 곡선은 변화하는 점근선의 중간점을 지남
2. Neutral Stability

- 의 전달함수에서 얻은 Bode Plot으로 Closed-Loop system의 안정도 판별
- Closed-Loop system의 root locus 작성시
모든 점에서 , - 허수축 위를 지날 때 (neutral stability) : ,
- Closed-Loop system의 root locus 작성시
- 에서 일 때,
- K=2이면
- K<2이면 : Stable
- K>2이면 : Unstable
- 즉 일 때 이면 Stable
- 만약 이면 일 때 이면 Stable
- Bode Plot의 경우 Gain이 1 (위상이 180도)인 지점을 여러번 지날 수 있어 안정도 판별에 어려움 존재
- Nyquist 안정도 판별법을 대신 사용
3. Nyquist Stability
- 편각의 원리

- 전달함수 H(s)에서 s가 임의의 궤적 C1을 따를 때,
- H(s)의 궤적은 s의 궤적 C1 안에 속하는 Zero - Pole 개수 차이만큼 원점을 포함하여 회전하는 궤적이 된다.
- zero가 더 많으면 시계방향, pole이 더 많으면 반시계방향
- 궤적을 RHP 모두를 포함하는 궤적으로 가정

- RHP에 zero 존재 : 시계방향 궤적
- RHP에 pole 존재 : 반시계방향 궤적
- 전달함수 일 때
- G(s)의 RHP Pole = 1+KG(s)의 RHP pole
- closed-loop의 RHP Pole = 1+KG(s)의 RHP zero
- N = Z-P
- N : 원점을 포함하며 시계방향으로 회전하는 궤적 수
- Z, P : T(s)의 RHP zero, pole 개수
- Z = N+P이므로, T(s)의 RHP zero가 없다면 G(s)의 RHP pole이 없으므로 안정된 시스템이다.
- Nyquist Plot의 작성법
- RHP 궤적 을 3개 영역에 나누어 KG(s)분석
- RHP를 따라 이동하는 Big Arc
- 무한의 반지름을 따라 이동하므로 계산
- 는 pole 차수가 더 클때 0, pole, zero 차수가 동일하면 상수
- KG(s)의 Bode Plot 작성
- breakout point의 좌표 확인
- Bode Plot을 기반으로 Nyquist Plot 작성
- Bode Plot에서 위상 0도일 때의 Gain = + 방향 X축에서의 시작 좌표
- 위상 변화에 따라 Gain 크기가 궤적의 반지름
- 궤적의 Loop 내에 포함되는 원점의 개수 확인
- RHP 궤적 을 3개 영역에 나누어 KG(s)분석
- ex.
- s가 매우 작은 값이 될 때, 로 근사
- r이 0으로 근사 시 매우 큰 값이 된다
- r이 무한으로 증가하면 궤적은 원점 근처를 지난다
- 위상 는 -90~ 90도로 이동하는 궤적이므로 G는 반시계방향 (90 ~ -90도)으로 이동하는 궤적이 된다.
- Bode plot 작성 시 w값이 -90에 가까울 수록 Gain이 커지고, -180도에서 0, 이후로 급격히 작아지므로 3사분면에서 시작하여 w=1 지점을 끼고 원점으로 수렴하는 궤적이 나타난다.

728x90