728x90
3. Dynamic Response
1. Laplace transform
- 미분 방정식의 풀이를 위해 사용
-
- 시간 영역의 함수 f(t)를 주파수 영역의 함수 F(s)로 변환
- : f(t)의 주파수
- : 진폭의 감쇄
- Fourier Transform : 에 대한 Laplace Transform
- Laplace Transform Property
- (inverse L.T.)

2. Inverse Laplace Transform
-
- 실제 존재할 수 있는 Transfer function에 대해
- : 함수의 영점(zero)
- : 함수의 극점(pole)
- Partial Fraction :
3. Final-value Theorem
- Laplace Transform을 이용, 시간이 무한히 흘렀을 때의 시스템의 최종값 계산
- sY(s)의 모든 극값이 좌반면 (s < 0)에 존재하는 경우
- sY(s)의 모든 극값이 좌반면에 존재한다
- = 분모의 식이 (s+a)(s+b)(s+c)...꼴로 표현
- 이는 , 즉 0으로 수렴하는 식으로 표현
- 만약 우반면에 존재하는 극값이 존재할 경우 y(t)는 무한으로 발산
- DC Gain
- 임의 시스템의 Transfer Function G(s)와, 입력U(s), 출력Y(s) 가정
- DC gain = : 입력과 무관한 시스템 고유의 특성
4. System Modeling
- 시스템의 신호 흐름을 표시
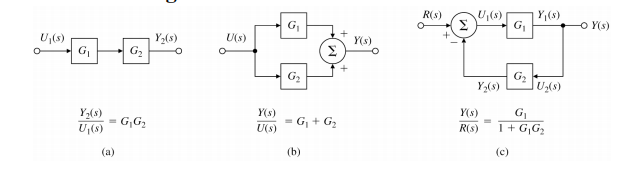
- 직렬 결합
- G1, G2의 두 시스템이 같은 선에 위치할 경우
- 시스템은 G1, G2의 곱으로 표시
- 병렬 결합
- 분기점을 기준으로 G1, G2가 나눠진 후 다시 결합
- 시스템은 G1, G2의 합으로 표시
- 피드백
- Unit negative feedback : feedback block이 1인 Block diagram
- 출력 신호가 온전히 input으로 들어오는, 이상적인 feedback
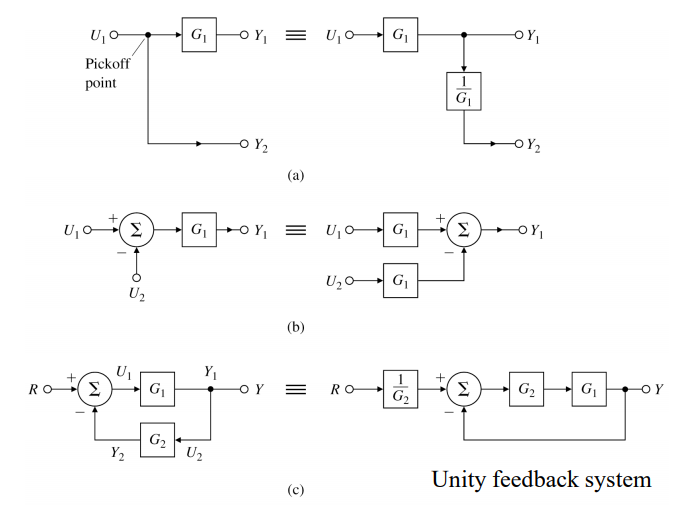
- 분기점(pickoff point) 이전의 분기신호를 분기점 이후로 옮기면, 중간에 있는 block의 역수인 block을 곱하여 배치한다.
- 신호가 합쳐진 뒤 있는 block은 합쳐지기 전 각각 신호에 block이 있는 회로와 동일
- feedback을 전향경로와 동일한 선에 배치할 때, feedback point 이전에 피드백 block의 역수인 block을 배치한다.
5. Effect of Pole Location
- 시스템의 전달함수가 일 때
- pole : 가 가 되는 값들 ()
- zero : 가 0이 되는 값들 ()
- Impulse response
- impulse function : let ,
- 시스템 의 impulse 입력에 대한 출력
출력- 크기가 1인 순간 출력에 대한 응답이므로, 시스템 자체의 고유한 response이기 때문에 impulse response를 natural response라고도 함.
- ex. 1st order pole
- impulse response
- 가 양수일 때 시간에 따라 response가 0으로 수렴하며, 이를 stable하다고 표현
- 의 pole이 음수(s-plane의 좌반면)일 때 시스템은 stable한 상태가 됨
- 1차 시스템의 time constant
- 시스템 response가 가 되는 시간
- time constant가 클 수록 응답의 속도가 빠름
-
ex. 2개의 complex pole을 갖는 시스템
- pole
- : damping ratio (속도에 의한 감쇠)
- : damping이 없을 때 진동 주파수
- : damping이 있을 때 진동 주파수 ()
- impulse response 는 지수함수와 삼각함수의 곱으로 표현됨
-
s-plane expression

- pole
- 에서
-
2차 시스템의 impulse response
-
( , ) -
, -
-
2차 시스템의 impulse response는 undamped natural frequency 과 damping ratio 에 의해 결정
- : 감쇄 없이 진동
- : 감쇄하면서 진동 (underdamped)
- : 진동 없는 감쇄 (Critical damped)
- : 목표값보다 과하게 감쇄되어 벗어남 (overdamped)
-
damping ratio 가 증가 > 실제 주파수 감소
-
damping ratio가 증가 > 허수축에서 pole이 멀어짐 > 증가
-
6. Step Response

- 임의 시스템 의 unit step 에 대한 응답
- unit step의 laplace transform
- step response는 0에서 시작해서크기 1을 향해 진동하면서 수렴
- rising time () : 목표값의 10%에서 90%까지 상승하는 시간
- peak time () : 시작점에서 peak점에 도달할 때까지의 시간
- step response :
- peak time에서 응답곡선 기울기 = 0
- 인 시간이 peak time :
- peak time은 damped natural frequency의 함수
- Overshoot () : peak값과 목표값의 차이
- , 이므로
- overshoot는 damping ratio의 함수
- settling time : 응답곡선이 목표값의 내에 도달하는 시간
- Controller Design
- 2차 step response 의 주요 parameter :
rising time, peak time, overshoot, settling time - settling time
- 응답 y(t)=0.01이 되는 시간
- rising time
- 목표값의 10%에서 90%까지 상승하는 시간
- 2차 step response 의 주요 parameter :
7. Stability
- Routh's Stability Criterion
-
임의 시스템의 pole이 모두 s-plane 좌반면에 존재하면 시스템은 stable
-
n차 시스템 의 안정도 판단
-
안정 시스템의 필요조건 : 모든 계수 ~이 양수
-
안정 시스템의 필요충분조건 : routh array의 1번 열이 모두 양수

-
special case
- 계수의 행이 최소공배수를 갖는 경우 최소공배수로 나누어 표현 가능 (부호는 변경할 수 없음)
- ex. 행 계수가 3, 24, 96, 192인 경우 3으로 나누어 1, 8, 32, 64로 표현 가능
- 계산한 계수 값이 0인 경우 : 로 대체하여 array 완성 후 부호 비교
- array 중 a번째 행이 모두 0이 된 경우
- a+1행 계수로 보조방정식 구성
- 이 식을 미분한 계수로 0이 된 행 대체
- ex. 행이 0, 행이 3, 12인 경우
- 즉 0이 된 행의 1열 계수는 6
- a+1행부터 시작하는 보조 routh-array 추출
- 보조 routh-array에서의 RHP = LHP, 남는 근은 허수축 위에 존재
- routh-array에서 a+1행 위의 계수로 보조방정식 외 나머지 pole 위치 판단
- 계수의 행이 최소공배수를 갖는 경우 최소공배수로 나누어 표현 가능 (부호는 변경할 수 없음)
-
728x90