728x90
Feedback

- H(s) : feed-forward gain
- G(s) : Loop gain
- feedback으로 인해 Gain은 감소하지만 안정
- 제한된 bandwith의 조절 가능
- loop gain 가 있을 때
- gain은 만큼 감소
- 대역폭은 만큼 증가

- 대역폭 증가시 시정수 감소
- 부족한 대역폭 = 긴 시정수 = 비정상 증폭
Stability, Frequency Comprehensation
- 피드백 단점 : 불안정 위험 (특히 2-stage Opamp)
- op-amp 회로의 주파수 응답
- 가장 작은 pole : bandwidth 주파수
- Gain Bandwidth : Gain 크기가 0이 되는 지점
- Barkhausen's Criteria

- , 를 만족하는 주파수에서 회로가 발진
- 진폭, 위상 Bode plot에서 Gain이 0인 주파수를 , 위상이 인 주파수를 으로 정의
- 일 때의 gain 차이를 GM(Gain Margin)
- 일 때의 위상차를 PM(Phase Margin)
- 일 때 회로가 stable
- loop gain 의 감소
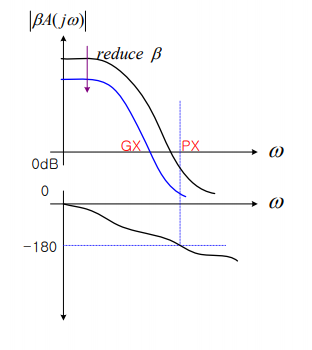
- Gain 감소
- 안정성 증가
- Pole-splitting

- feedback 회로에서 stable 상태를 유지하면서 PM = 60일 때가 최적의 상태
- 2단 opamp의 경우 2단째에 C로 피드백을 형성하여 1, 2번째 pole 사이 간격을 넓힐 수 있음 (pole-splitting)
- PM은 확보되지만 bandwidth는 나빠짐
- RHP zero
- 패드백 커패시터 , 부하 커패시터 , 내부 커패시터
- 의 조건 만족시 s-plane 우반면에 zero 형성(RHP zero)
- gain은 감소하고, 위상은 더 감소하는 worst case
- feedback에 R(LHP zero)을 추가하여 RHP zero 보상
728x90