2. Dynamic Models
2. Dynamic Models
- 컨트롤러 설계 전에 구하는 시스템 제어를 위한 시스템의 수학적 표현식
- 시스템의 동작을 나타내는 미분방정식
- 기계적 시스템, 전기회로, 전기적(electromechanical) 시스템
2.1. Dynamics of Mechanical Systems
- 뉴턴의 법칙 - translational motion F=ma
- F : 질량에 가해지는 힘의 벡터합
- a : 질량에 가해지는 관성 가속도
- m : 질량
- 1N=1kg⋅m/sec2
- ex 1. Cruise-control model
- 자동차는 수평 방향으로 이동한다고 가정
- 바퀴의 회전관성은 무시
- 자동차-지면 사이의 마찰력은 속도에 비례

- u−bx‘=mx‘‘
- (구하려는 값은 속도x‘:=v)v‘+mbv=mu
- (라플라스 변환)sV(s)+mbV(s)=mU(s)
- U(S)V(s)=s+b/m1/m
- ex 2. suspension system
- 서스펜션은 오직 1차원 수직운동을 한다.
- 자동차 바퀴에는 무게가 균등하게 분산된다.
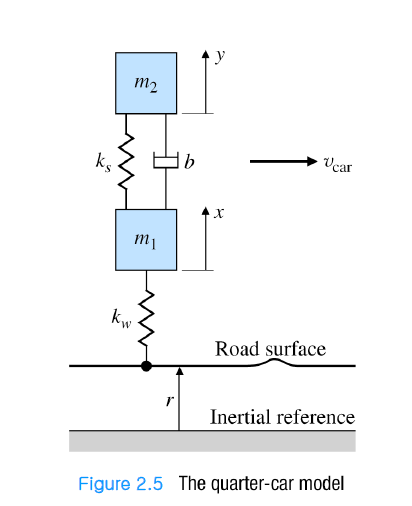
- m1 : 타이어의 무게 / m2 : 자동차 무게의 1/4
- x : 타이어의 변위 / y : 차체의 변위 / r : 높이의 변화
- k : 용수철의 탄성계수 / b : 댐퍼 계수
- 변위에 따른 응답을 계산하므로 중력가속도에 의한 힘 m1g, m2g는 상쇄되어 사라진다.
- 정해진 상황(ex. m2는 멈춘 채로 m1만 위로 움직인다)에 대한 differential eq.를 구하더라도 그 식은 시스템 내의 고유한 응답을 나타내는 식이기 때문에 다른 상황에 대해서도 성립할 수 있게 된다.
- m1만 움직이는 경우
- 아래 스프링 kw는 늘어나고, 위 스프링 ks는 압축된다.
- 지변 변위를 고려하면 아래로 가해지는 힘은 kw(x−r)
- 위 스프링의 경우 m2가 y방향으로 이동할 것을 고려하면 스프링의 힘은 ks(y−x) (x, y 둘다 지면 변위의 영향을 받으므로 식에서는 상쇄된다.)
- 댐퍼 역시 y방향 변위를 고려하면 b(y′−x′)
- m2만 움직이는 경우
- 스프링에 의한 힘 ks(y−x)
- 댐퍼에 의한 힘 b(y‘−x‘)
- 입력 : 높이 변위 r / 출력 : 자동차의 높이 변화 y
- i. b(y′−x′)+ks(y−x)−kw(y−x)=m1x‘‘
- ii. −[b(y‘−x‘)+ks(y−x)]=m2y‘‘
- ii를 x에 대해 정리 후 i에 대입하면 R(s)Y(s)=s4+b(m11+m21)s3+(m1ks+m1kw+m2ks)s2+m1m2kwbs+m1m2kwkskw(sb+ks)/m1m2
- 회전운동에 대한 뉴턴운동의 법칙
- M=Iα
- M : 회전 중심에 대한 모멘트의 합
- I : 무게중심에 대한 회전관성모멘트 (I=ml2)
- α : 각가속도
- ex. Pendulum
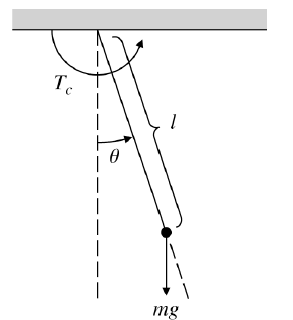
- 운동방정식 TC−mglsinθ=Iθ′′
- θ′′+lgsinθ=ml2TC
- 작은 운동에 대해서 sinθ≃θ
- Transfer Eq. TC(s)Θ(s)=s2+g/l1/ml2
- 실험 오차

- 펜듈럼 모델을 Matlab으로 실험하여 보면 정현파 형태로 나타나는 것을 확인 가능하다.
- 계산 편의상 단순화한 부분들에 대해 오차가 발생하기 때문에 실제 실험 결과와는 차이가 발생할 수밖에 없다.
- ex. 회전 운동과 직선 운동의 조합

- 질량 mt,mp인 크레인과 펜듈럼이 각각 직선/회전운동
- 힘 μ가 가해지며, 차량은 x방향으로 이동
- 회전운동
- 중력에 의해 지면 방향으로의 회전운동이 발생 : −mpglsinθ
- 크레인의 직선운동에 의한 펜듈럼의 관성 : mpx′′cosθ
- ∴(I+mpl2)θ′′=−(mpx′′cosθ+mpglsinθ)
- 직선운동
- 작용-반작용 N과 마찰계수 b를 고려
- u−N−bx′=mtx′′
- 펜듈럼에 의한 반작용
- 펜듈럼 운동 mpx′′
- 회전 운동 mplθ′′cosθ
- 구심력 rmv2=mpl(θ′)2sinθ
- N=mpx′′+mplθ′′cosθ−mpl(θ′)2sinθ
- simplify : b=0,θ≃0⇒sinθ=θ,cosθ=1
- 회전운동 : −mplx′′−mpglθ=(I+mpl2)θ′′
- 직선운동 : (mt+mp)x′′+mplθ′′=u
- 라플라스 변환
- 회전운동 : −s2mplX(s)−mpglΘ(s)=s2(I+mpl2)Θ(s)
- 직선운동 : s2(mt+mp)X(s)+s2mplΘ(s)=U(s)
- 회전운동의 식을 X(s)에 대해 정리 후 직선운동에 대입하면
- U(s)Θ(s)=((l+mpl2)(mt+mp)−mp2l2))s2+mpgl(mt+mp)−mpl
- 전달함수의 단점 : 단일 입력-단일 출력(SISO)에 대한 수식 모델 설계 가능
- 정리
- 대상 시스템의 dynamic behavior 단순화
- free-body diagram
- 뉴턴의 법칙 / 회전운동 / 전자회로 등을 이용한 미분방정식
- 초기값 = 0인 조건 하에 Laplace Transform
- Transfer function = 출력 / 입력